Na augustus vorig jaar heeft het Stacker project stilgelegen. Zo gaat dat. Ik kan ergens intensief mee bezig zijn en het dan een tijd laten liggen. Maar … er komt een moment dat ik het weer oppak. En voor de Stacker is dat nu!
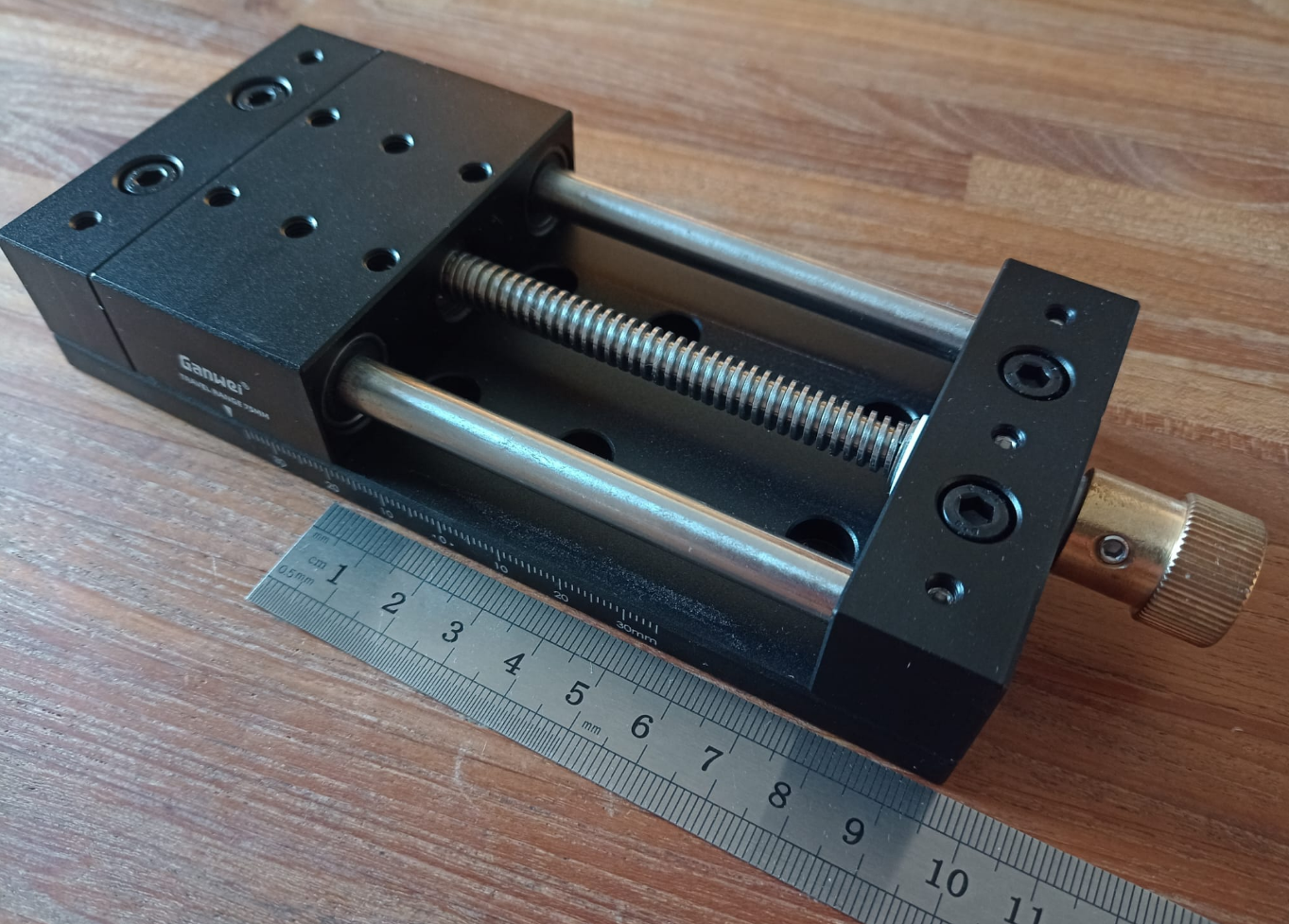
Bij Ali namelijk een fraaie rail gevonden voor ‘weinig’.
Het grootste uitdaging in dit project is om foto’s te maken met een strakke beweging van de camera over de rail. Bij alle resultaten tot nu toe zie je dat de camera min of meer over de rails zwabbert. Met als gevolg dat de foto’s ook heen en weer zwabberen. In deel 8 heb ik dat uitgelegd en in deel 12 zijn de resultaten daarvan getoond. Met de laatste versie van de Stacker is dat gezwabber wel afgenomen (het neemt wel af bij elke aanpassing in die richting), maar nog altijd niet ‘weg’. De uitdaging is dus om het gezwabber steeds verder terug te dringen.
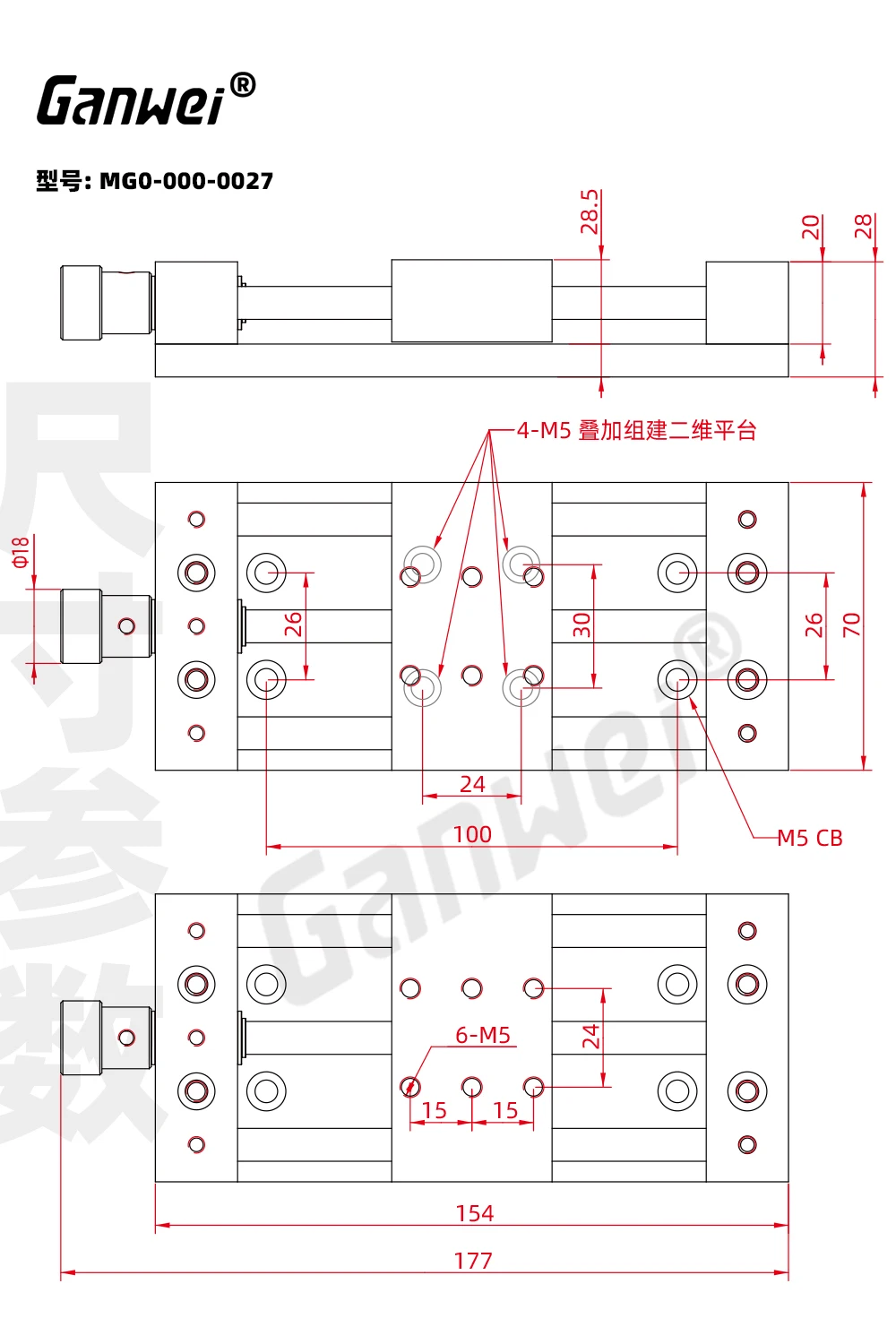
De nieuwe rail is gemaakt van aluminium en weegt 700g. Hij is klein; er is een beweging van slechts 75mm van voor naar achter mogelijk, maar dat is voor mijn doeleinde natuurlijk meer dan toereikend. Volgens de beschrijving kan ie tot 10Kg dragen en dat lijkt mij ook meer dan genoeg. Met een spoed van 2mm per omwenteling komt de verplaatsing overeen met de andere Stackers. Er zitten 6 M5-gaten in het plateau, waarop de camera bevestigd gaat worden.
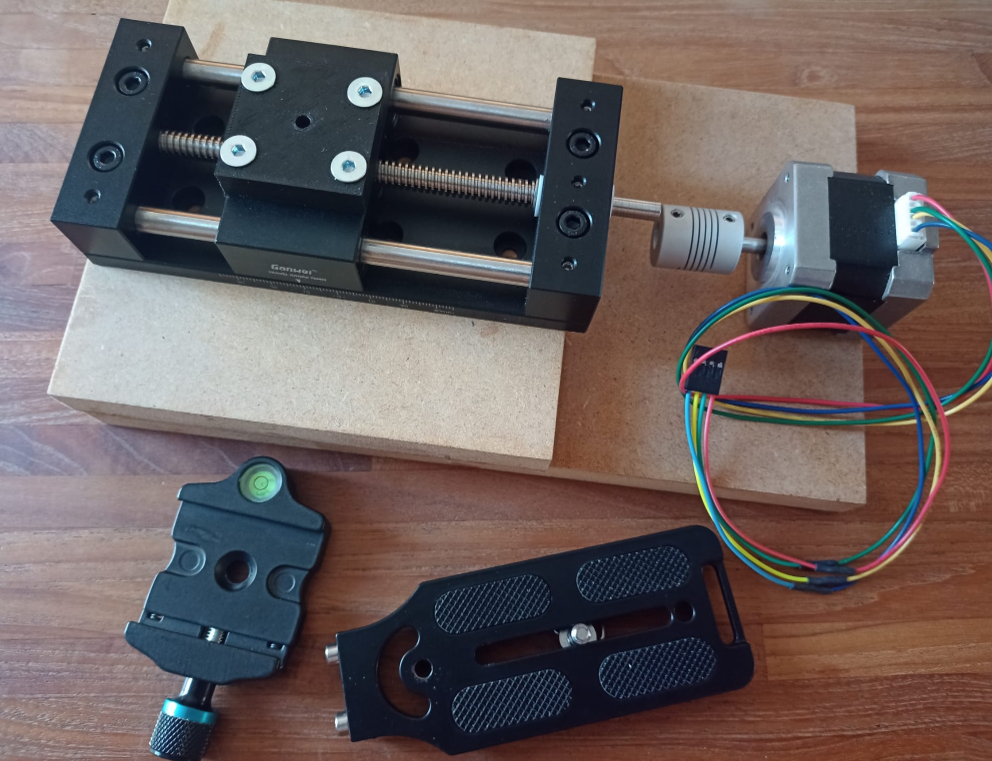
Hierboven zie je de onderdelen van de nieuwe Stacker (de NEMA17-motor nog zonder montagebeugel). Op de rail is een 3D-geprint koppelblokje geplaatst waarop de linksonder getoonde Arca zwaluwstaartkoppeling gemonteerd wordt. Onder in beeld de basisplaat (ook met Arca zwaluwstaartkoppeling) waar de camera op bevestigd wordt.


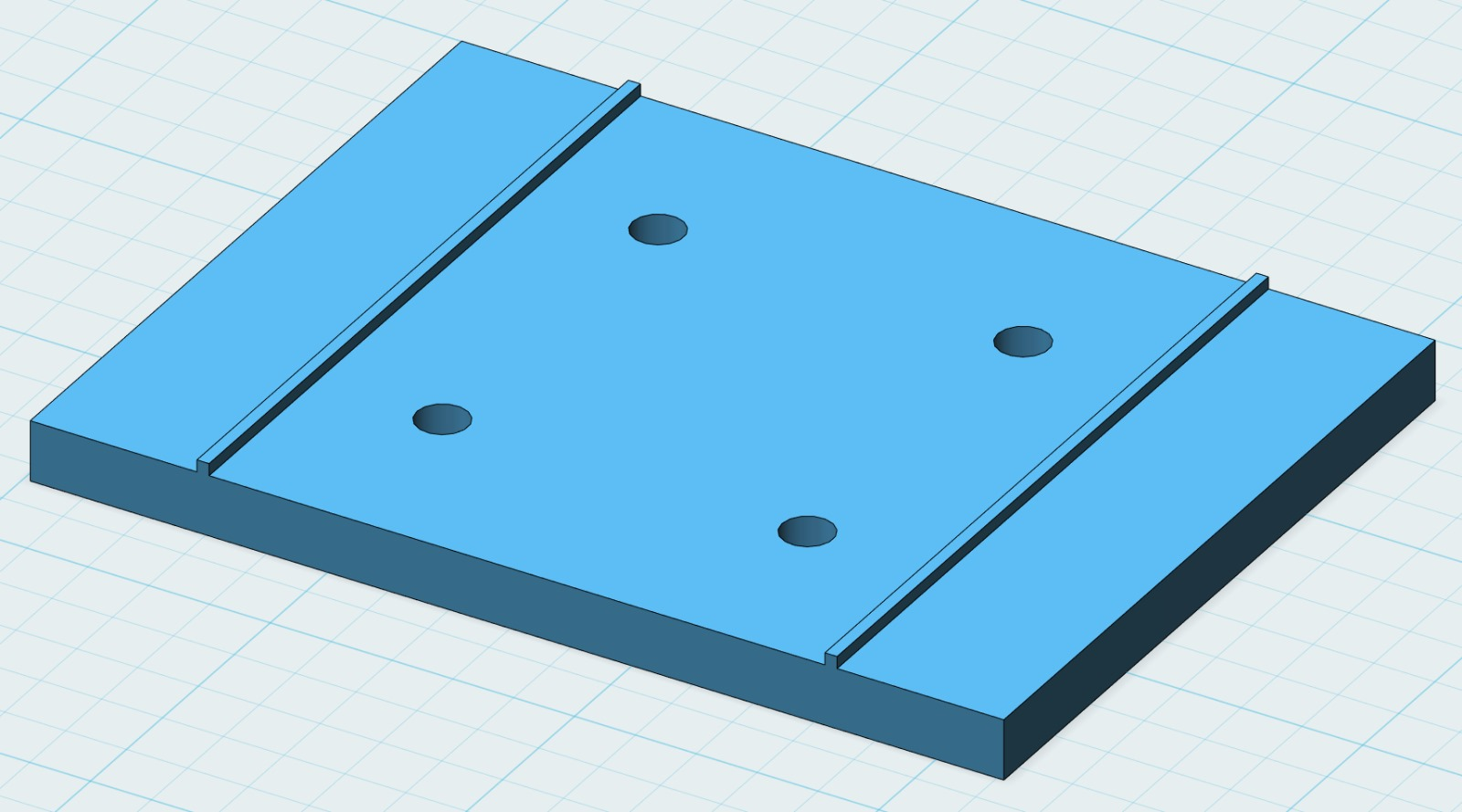
Van een paar plankjes MDF is een basis in elkaar gezet.
De as van de motor moet natuurlijk zoveel mogelijk in het verlengde van de as van de rail liggen. Om de aansluiting tussen deze assen zo secuur en ook zo eenvoudig mogelijk te maken heb ik ervoor gekozen om de Ganwei-rail op een tweede plankje MDF te bevestigen. De rail komt daarmee ca. 1,8cm hoger te liggen dan de motor. De NEMA17-motor met bevestigingsbeugel komt dan op het onderste plankje.
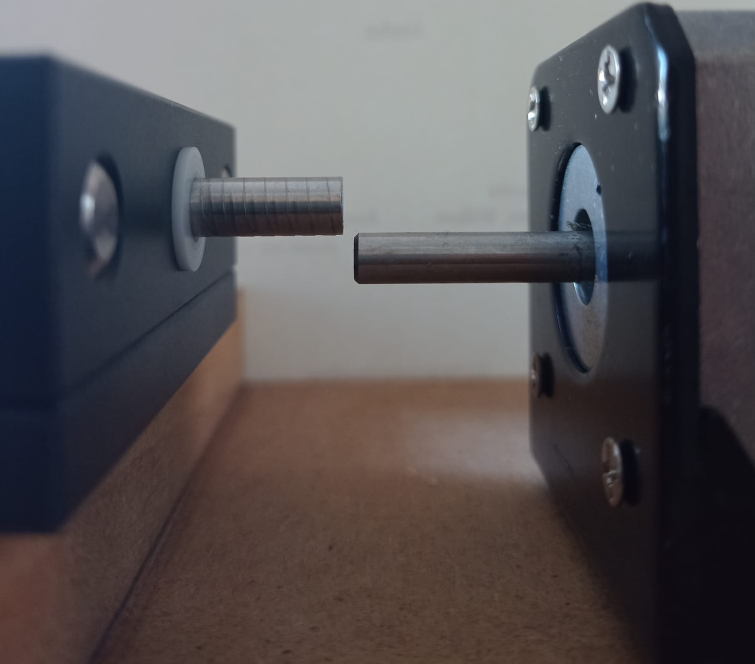
Hierboven is te zien dat het verschil in hoogte tussen de twee assen ca. 5mm is. Een 3D-geprint basisplaatje van 5mm lost dit hoogteverschil op.
Kleine afwijkingen worden verder opgevangen door de askoppeling.

Een van de aanbevelingen van Alan Walls is om bij het fotograferen van de modellen reflectie zo veel mogelijk te voorkomen. Hiervoor stelt hij voor om alles in de Micro Cage matzwart te maken. Bij mij was alles tot nu toe vooral wit om zoveel mogelijk licht te hebben. Nu dan toch maar de basis van de Micro Cage en van de Stacker netjes (?) mat zwart geschilderd. Ook maar eens op zoek naar een zwartfluwelen achtergronddoek (ter vervanging van het witte karton!).
Wanneer het geschilderde hout goed droog is kan ik Stacker V opbouwen.



Zoals hierboven te zien is de Micro Cage, met witte basis en witte achtergrond, nog altijd opgebouwd met ongeschilderde houten balkjes (12mm x 12mm en 400mm lang) met 3D-geprinte koppelstukjes (zie ook deel 4). Ik zit er over na te denken om de Cage opnieuw op te bouwen met Totem-onderdelen; die zijn mooi zwart. Daarnaast zijn er enorm veel mogelijkheden om er constructies mee te maken. Totem heb ik eerder gebruikt voor een robotwagentje.
Maar dat komt op een ander moment.
