
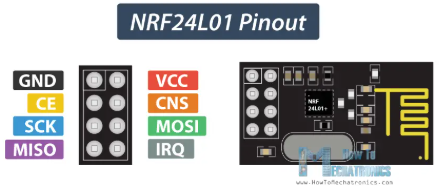
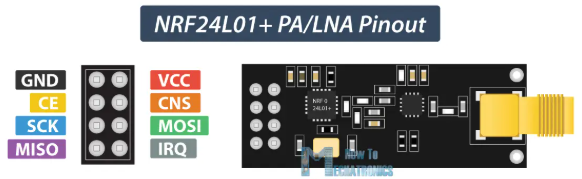
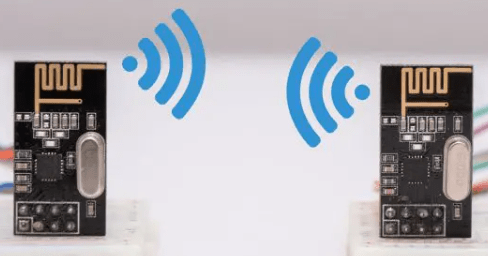
Tussendoor wat gerommel met een op afstand te besturen wagentje. Een tijd terug had ik een aantal Nordic nRF24l01 radiomodules (transceivers) gekocht om wat mee te experimenteren. Hier vind je een mooie uitleg over die modules. Het zijn modules om draadloos gegevens uit te wisselen tussen microcontrollers. Ze werken op 2,4 GHz, zien er uit als de ESP8266 modules, maar werken niet via WiFi.
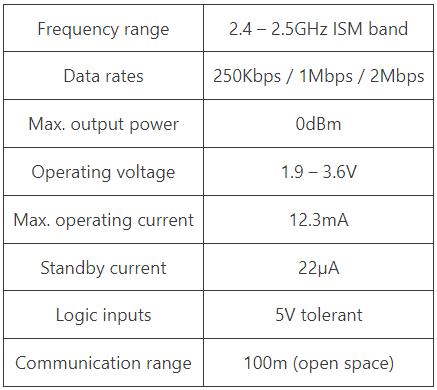
Wat ze vooral zo aantrekkelijk maken (voor mij) is hun geringe stroomverbruik. Dat maakt ze zeer geschikt voor batterijgevoede projectjes, dit in tegenstelling tot de ESP-modules.
Op internet kwam ik ze op enig moment weer eens tegen de zogenaamde Mecanumwielen: wielen die een wagen in elke richting kunnen laten bewegen. Een bijzonder ontwerp.
Onze vrienden in China kunnen ze leveren, dus snel 4 stuks besteld: 2 linker en 2 rechter wielen.

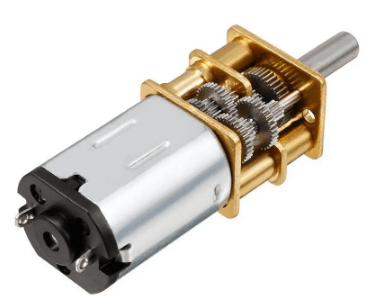
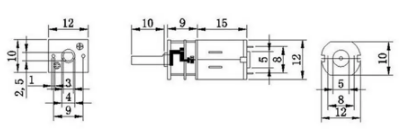
De wielen moeten elk afzonderlijk aangestuurd worden, dus ook maar een paar (kleine) dc-motortjes besteld. Eerst twee, later nog een paar erbij. Deze werken op 3V, met een vertraging naar 30 toeren per minuut (tpm).
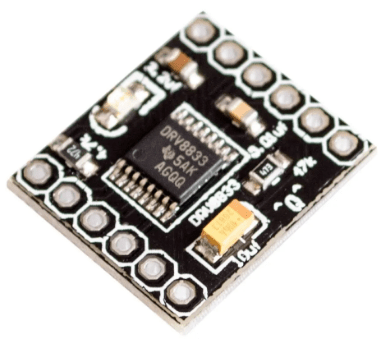
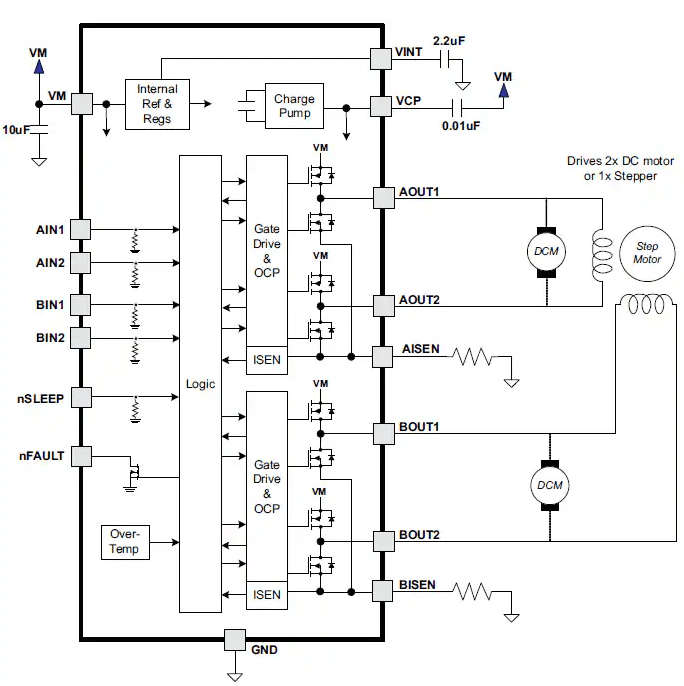
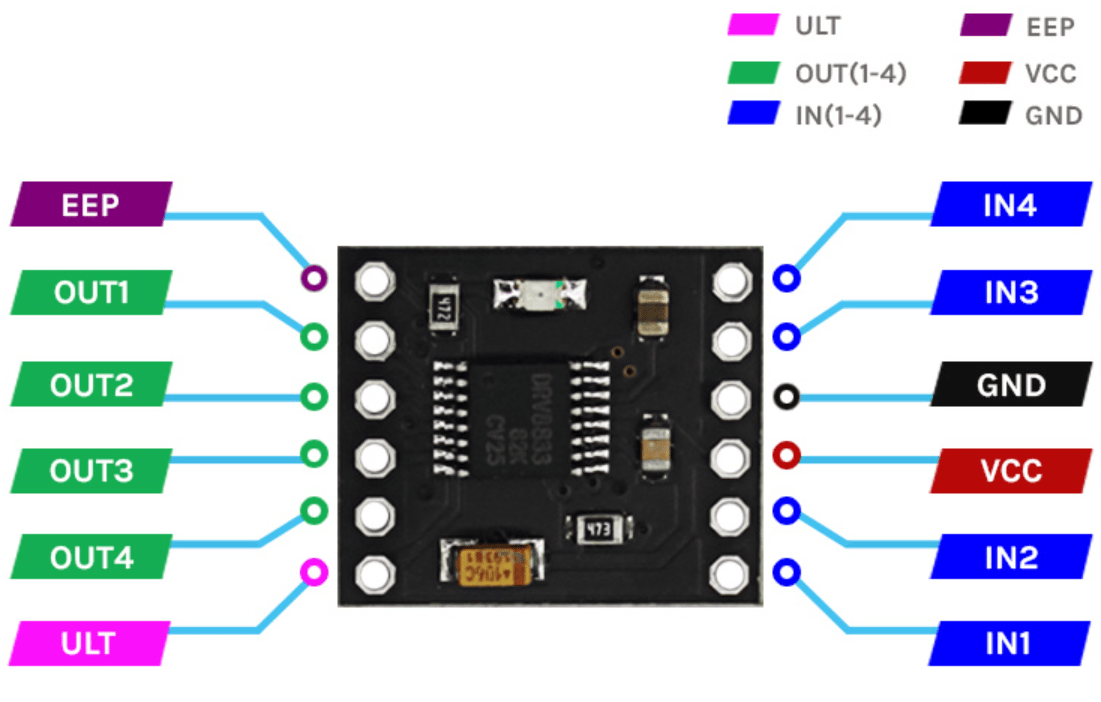
Voor de besturing van de motortjes maak ik gebruik van twee DRV8833 ( 3V – 10V, 1,5A) die ik al heb liggen. Elke module kan twee motoren aansturen.
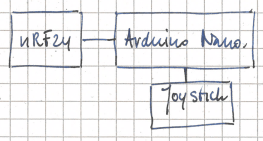
Alles samengevoegd ziet het er schematisch zo uit. De wagen: een Arduino Nano vormt het hart van het geheel, de stuurinformatie komt binnen via de radiomodule, de aandrijving van de motoren wordt verzorgd door de DRV8833-modules. De stroomvoorziening geregeld door een oplaadbare batterij (18650).
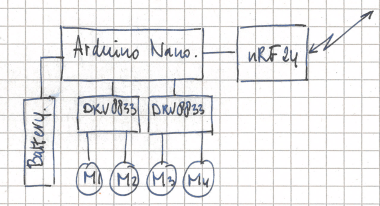
De besturing verloopt via een tweede Arduino Nano die de stand van een mini joystick uitleest en deze waardes via een tweede radiomodule naar de wagen stuurt.

De constructie van de Mecanum-wielen is zeer bijzonder. Er zijn vreemdsoortige manoeuvres mee uit te voeren. Hieronder wat voorbeelden.
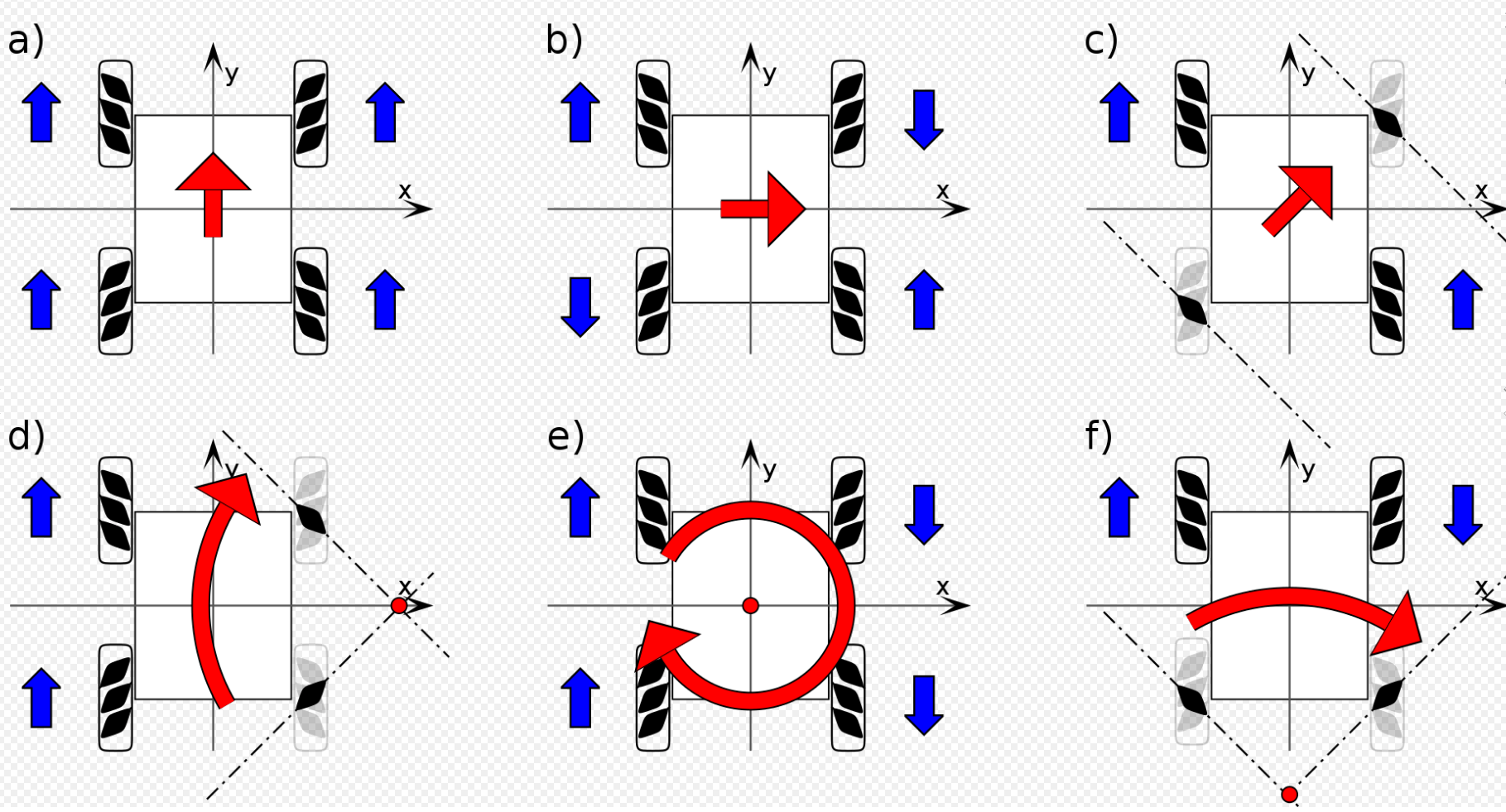
Met gewone wielen zijn de verplaatsingen zoals bij b en c niet mogelijk! Wanneer de twee extra motortjes binnen zijn zullen we zien of mijn Ali-mecanum-wielen ook tot zulke bewegingen van het wagentje zijn te bewegen!

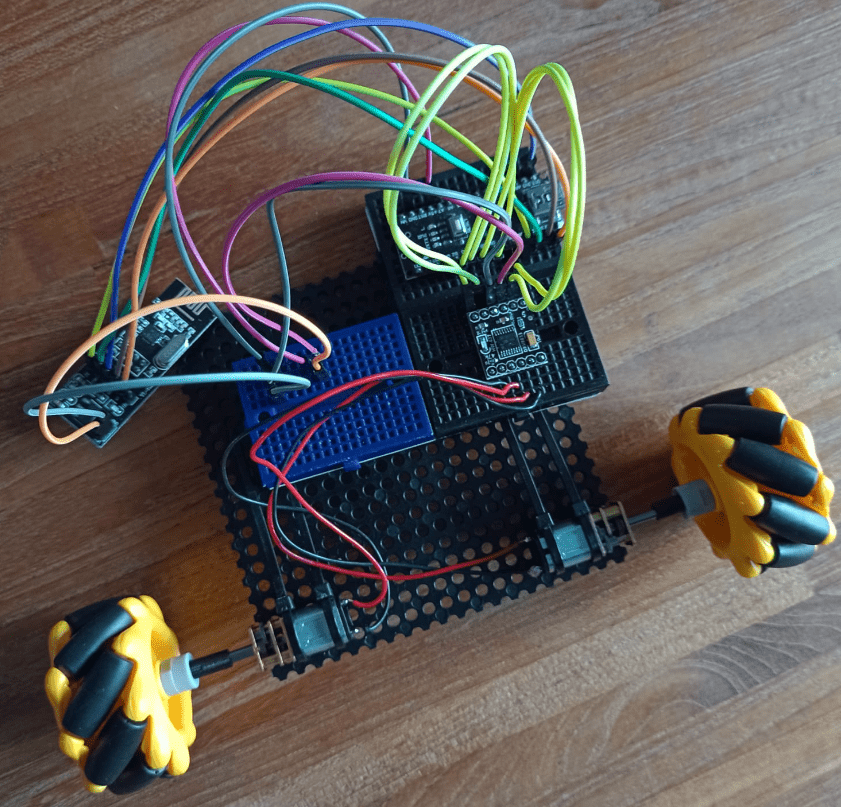
De bijbestelde micro motoren zijn inmiddels binnen, dus nog even en we kunnen rondrijden.