Eindelijk heb ik uitgetest of het idee uit het eerste deel van deze serie lukt: een loc uitrusten met een Wifi-module en op afstand aansturen en vooruit en achteruit laten rijden. Helaas, vooralsnog werkt het niet! Hieronder verslag daarvan.
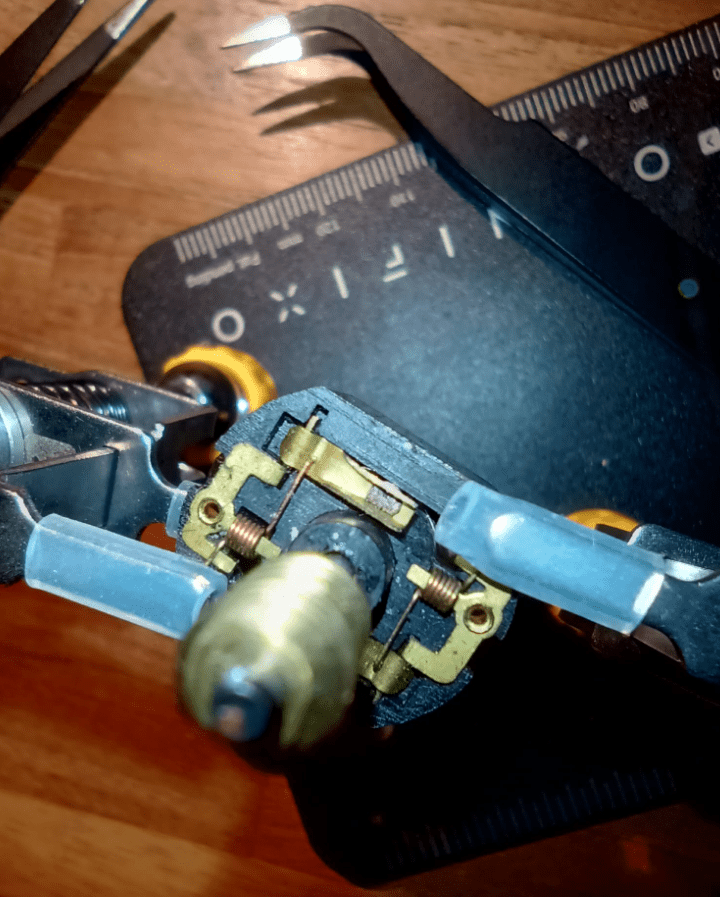
Tijdens de ontmanteling van het opgeofferde loc-je (ergens 3 jaar geleden) was bij het loshalen van de motor een van de koolborsteltjes, inclusief klemmetje, losgekomen: grootte van de koolborstel ca. 1,5 x 1 mm. Terugplaatsen was even een priegelwerkje, maar dat is uiteindelijk gelukt. Hieronder zie je het motortje ingeklemd in de klemmen van mijn nieuwe “derde-handje” de Omnifixo. Een ongelooflijk handig gereedschap!
De eerste stap was om de stroomvoorziening van de rails, via de wielen, naar de motor te onderbreken. Hieronder zie je het loc-je met daarop het motortje. Aan de contactpunten van de wielen zijn een blauwe (12V) en een zwarte (gnd) draad gesoldeerd en naar achter geleid. Ook aan de contactpunten van de motor zijn een blauwe (+) en een zwarte (-) draad gesoldeerd en naar achter geleid. De (directe) verbinding van rails naar de motor zijn hierbij onderbroken.


De draden zijn door de raampjes van het loc-je naar achteren geleid: de draden vanaf de wielen in het midden, de draden van de motor aan de zijkanten.

Vervolgens zijn de buck-converter, de ESP en de motordriver met elkaar verbonden. Het geheel is toch nog redelijk compact, maar kan eventueel nog kleiner wanneer de draden wat verder ingekort worden.

Het past met gemak in een wagonnetje. Eindelijk kon alles op de rails gezet worden en uitgetest worden. Zoals hierboven al aangegeven wilde de zaak niet werken. De stroomvoorziening via de rails naar de elektronica werkt: de ESP start keurig op, de blauwe LED licht kleurig blauw. Ook de webserver start prima op met snelheid “0: stop” en is te bedienen.

Zodra je een snelheid kiest hoor je de motor werken: hij wil wel optrekken. De loc komt ongeveer 1 mm (!) in beweging, de LED van de ESP dooft (reset van de Wemos), de trein stopt. Het lijkt erop dat het stroomverbruik van ESP in combinatie met de optrekkende loc te hoog is voor de voeding, hoewel die 2,5A zou moeten kunnen leveren. Zoals hierboven te zien is heb ik nog een elco van 1000uF ingezet, om de spanningsval te bufferen, maar dat mocht niet baten.
Tja. En wat nu? Gedachten op dit moment:
- nameten van de voeding; voltage en stroom tijdens opstarten: eerst met alleen ESP, daarna met optrekken van de motor,
- misschien grotere elco inzetten; 4500 uF bijvoorbeeld,
- misschien is het PWM-signaal niet toereikend voor de motor: eventueel software aanpassen,
- toch kiezen voor Bluetooth of nRF24l01-module,
- of …. ?
Nou … het werkt wel, maar alleen heel erg kort. Wat gaat er nou precies mis?