
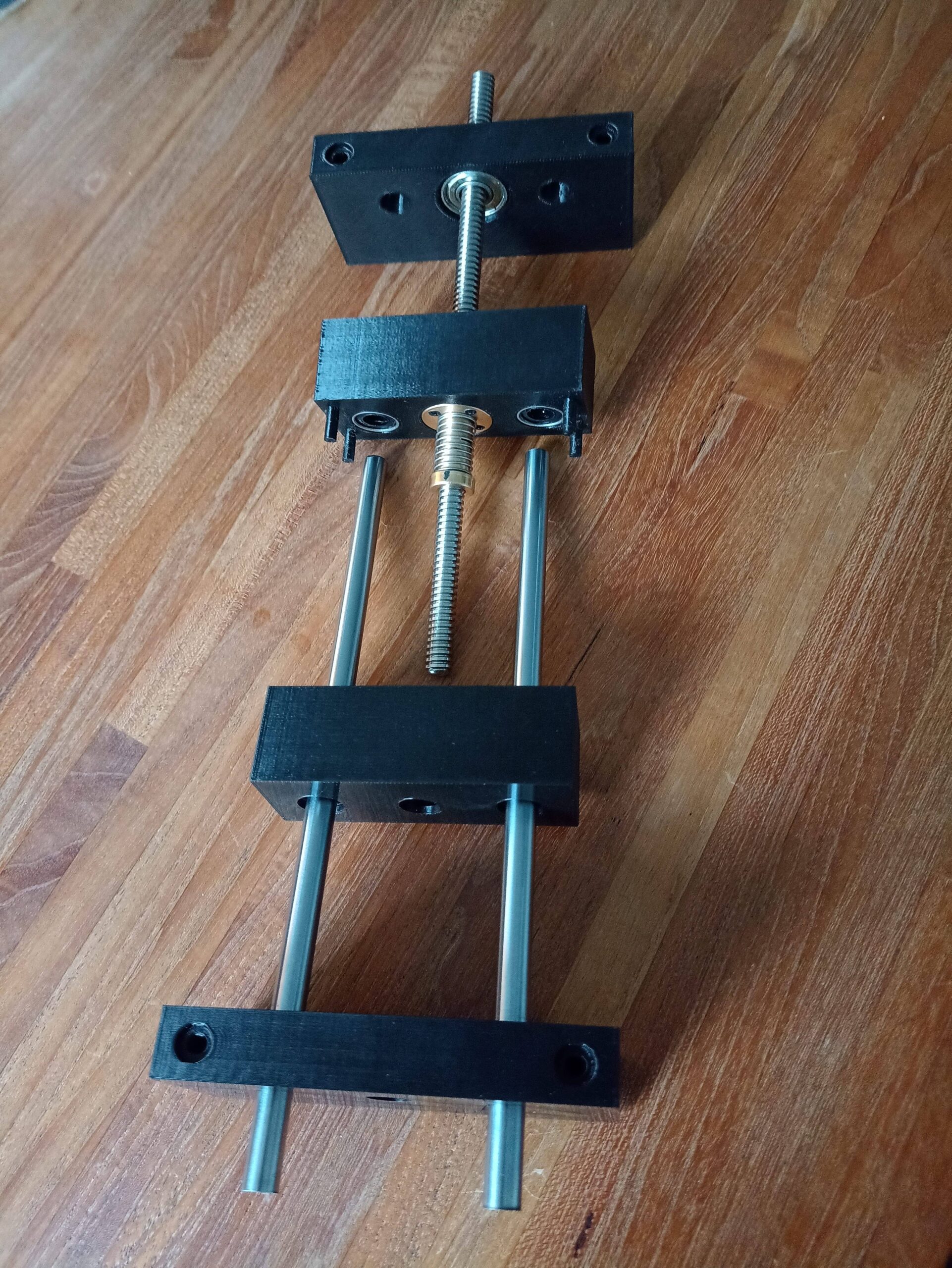
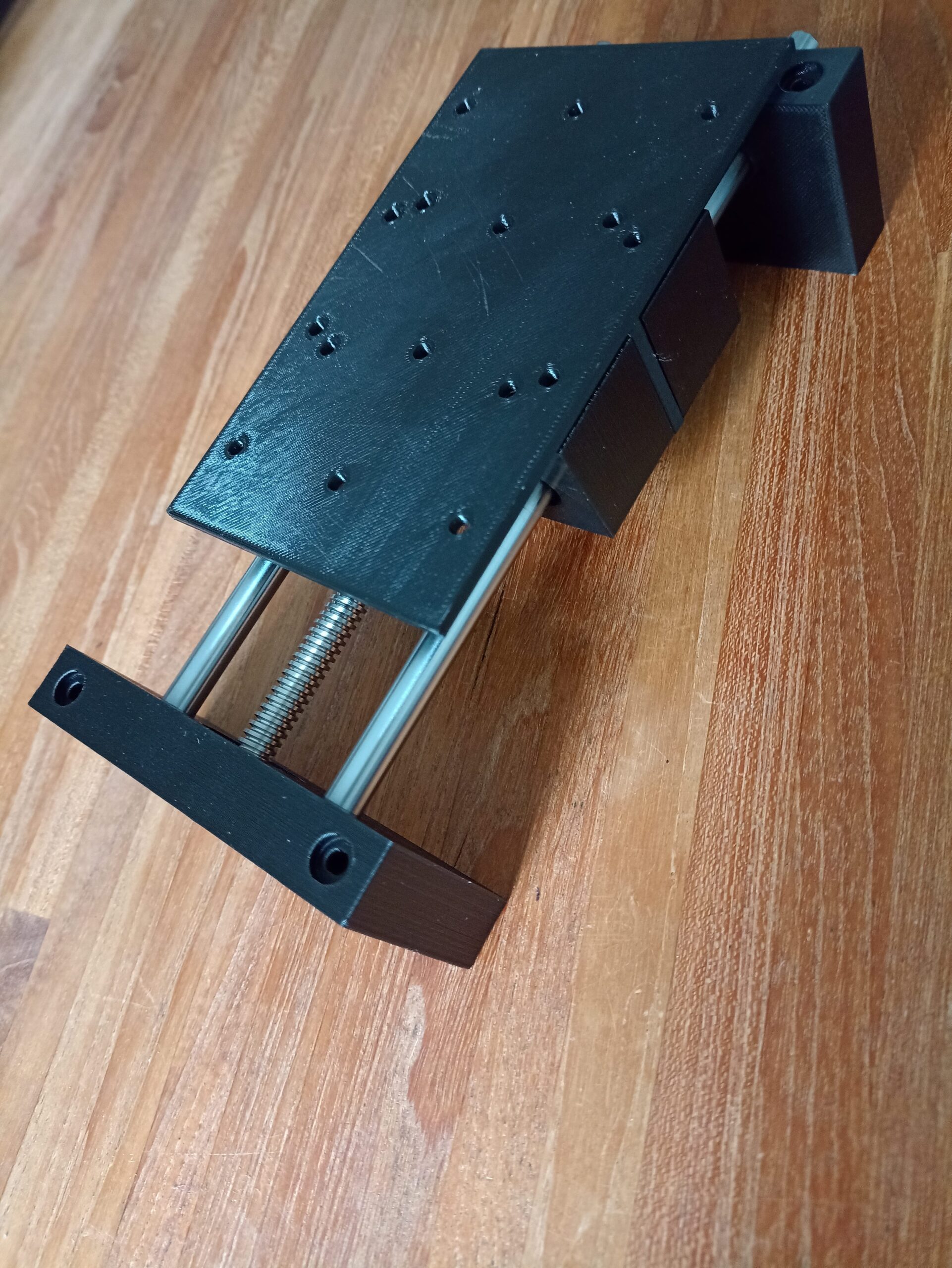
De 3D modellen aangepast en geprint. Spindel, glijstangen en lagers erin. Op het plankje gemonteerd. Camera met balg via de Arca-Swiss-snelkoppelingsplaat erop.

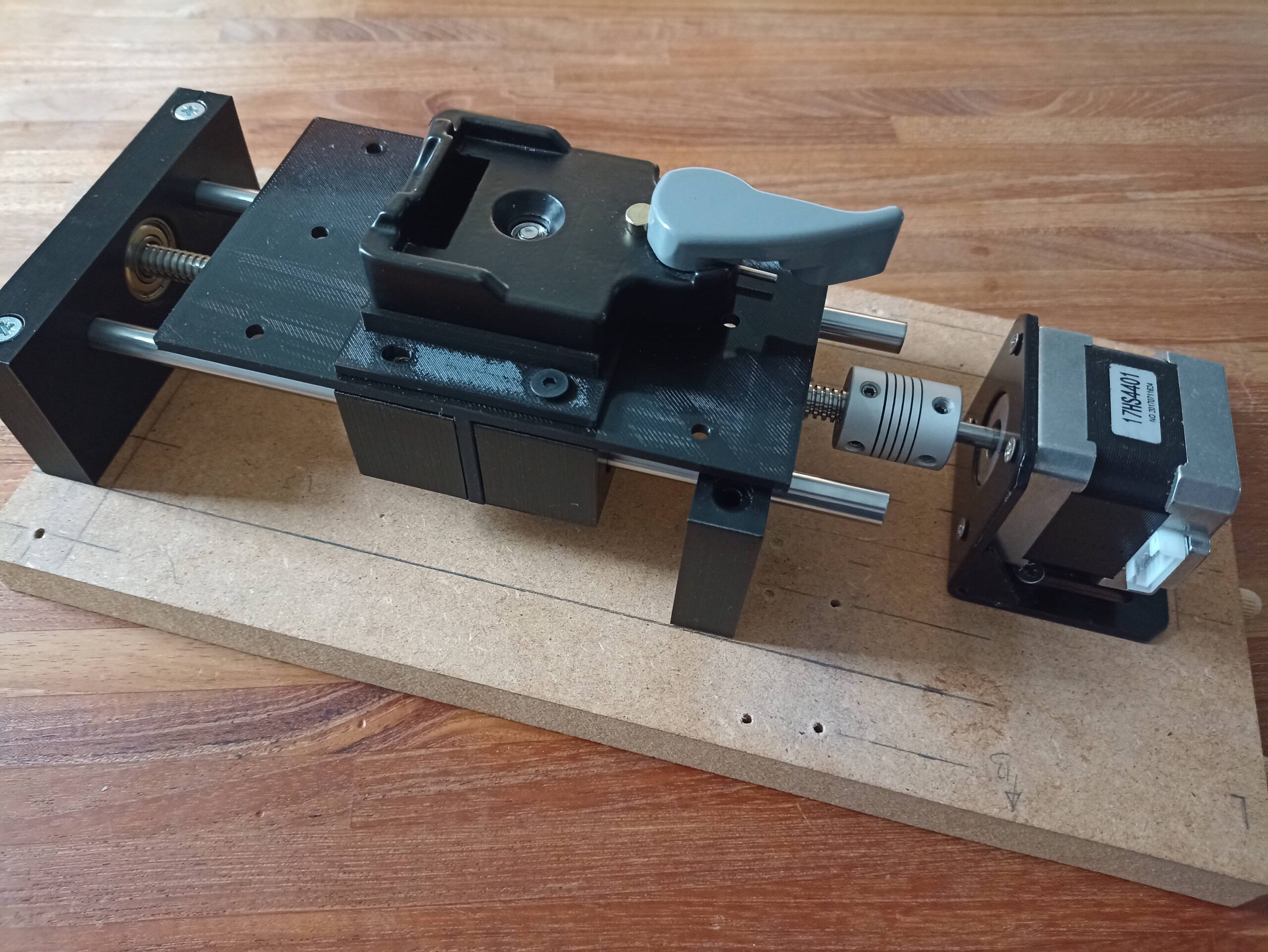
Naast de de Stacker-rail is ook de elektronica en de daarin verwerkte software tussentijds geüpgraded. In het bovenstaande plaatje zie je rechts een NEMA17 stappenmotor in plaats van de eerder gebruikte 28BYJ. Deze motor wordt aangedreven door een DRV8825-driver board. De motor doet standaard 200 stappen per omwenteling, dat is 1,8 graden per stap. De DRV8825 heeft 3 pinnen (M0 t/m M2) waarmee de stapgrootte aangepast kan worden.
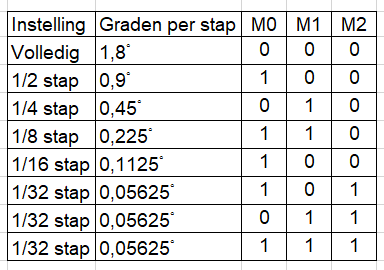
Een “1” op M0 en M1, met een “0” op M2 resulteert dus in een 1/8 stap per puls. Er zijn dan dus 8 maal 200 (1600) stappen nodig voor één as-omwenteling. De spindel heeft een spoed (verplaatsing per omwenteling) van 2mm. Die 2mm is dus na 1600 stappen volledig. Elke stap is dus een verplaatsing van 2mm gedeeld door 1600 stappen, dat is 1,25 micrometer.
In de praktijk blijkt dat meer dan voldoende resolutie. Een test wijst uit dat de wagen na 20.000 stappen 25mm is verplaatst. 25/20.000 = 0,00125 mm = 1,25 micrometer, dus dat klopt.
Hieronder het schema van Stacker IV.
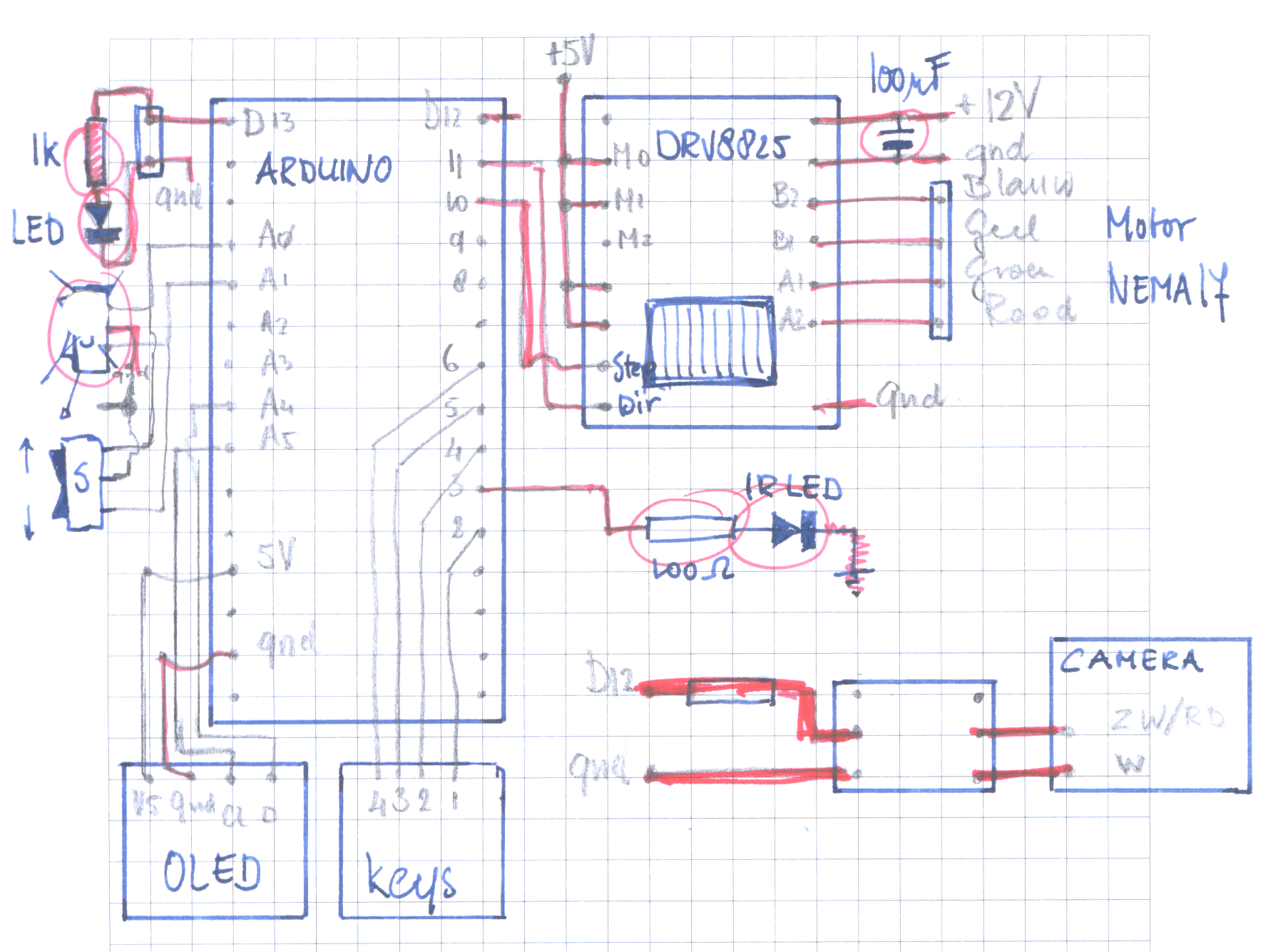
Er is nog maar een rij van 4 knopjes toegepast (gevolg van de reductie in het aantal programma’s). Wel is er op de pinnen A0 en A1 een ‘rocker-schakelaar’ aangesloten waarmee de wagen makkelijk naar voren, dan wel naar achter gestuurd kan worden.

Daarnaast blijkt in de praktijk dat er eigenlijk maar een programma zinnig is. Dit programma bestaat uit de volgende stappen.
– Welke afstand kiezen tussen de foto’s (in micrometer).
– Bepaal het eindpunt tot waar er foto’s gemaakt moeten worden.
– Bepaal het startpunt waarvandaan de serie foto’s gemaakt moeten worden.
Het start- en eindpunt vormen de weg die gegaan moet worden en bepalen het deel van het specimen dat scherp in beeld moet komen. De afstand tussen de foto’s bepaalt het aantal foto’s dat gemaakt moet worden: hoe meer foto’s hoe (theoretisch) gedetailleerder het uiteindelijke resultaat zal zijn.
Het programma is hierop aangepast en in de Arduino gezet. Vervolgens is ook het Python programma hierop aangepast.
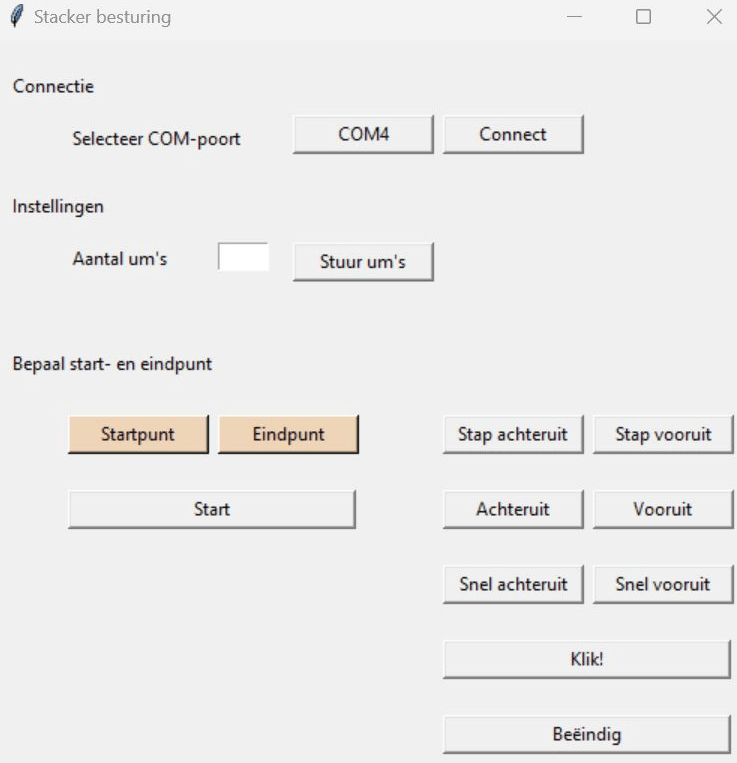
Middels dit Python programma is de Stacker vanaf een afstandje te besturen. In de macro cage wordt eerst alles goed neergezet: specimen op de juiste hoogte en hoek ten opzichte van de camera, de verlichting van alle hoeken geplaatst, enz.
Op de camera is een zeer handig naamloos 7″ HDMI-beeldschermpje aangesloten. Het direct-view-beeld komt direct op het schermpje, zodat je vanaf de computer goed het start- en eindpunt kunt bepalen.

Hieronder test 41: Wants van de zijkant.

Camera 1/10, ISO 100.
Balg 105mm.
Microscoopobjectief 4x.
Stapgrootte 20um.
178 foto’s.
En …. jammer genoeg ook nu weer een dwaalspoor van puntjes.